I intend for the XM8 to have noise as a waveform for both oscillators, and also to be able to switch between various 'colors' of noise. At the very least, white and pink noise should be present, possibly even red. But what exactly does this mean?
White noise is noise where the signal has equal intensity at all frequencies. In the synth world, it is commonly generated by using a transistor with one leg disconnected.
Pink noise is a signal where each octave carries the same amount of noise energy. But how is this achieved in practice?
According to Wikipedia, pink noise falls off at 3dB per octave. To get pink noise one filters white noise through a filter with 3dB/octave drop off.
Problem is, most basic active low pass filter has a 6dB drop off (which would actually give us red noise if used). So how may this be solved?
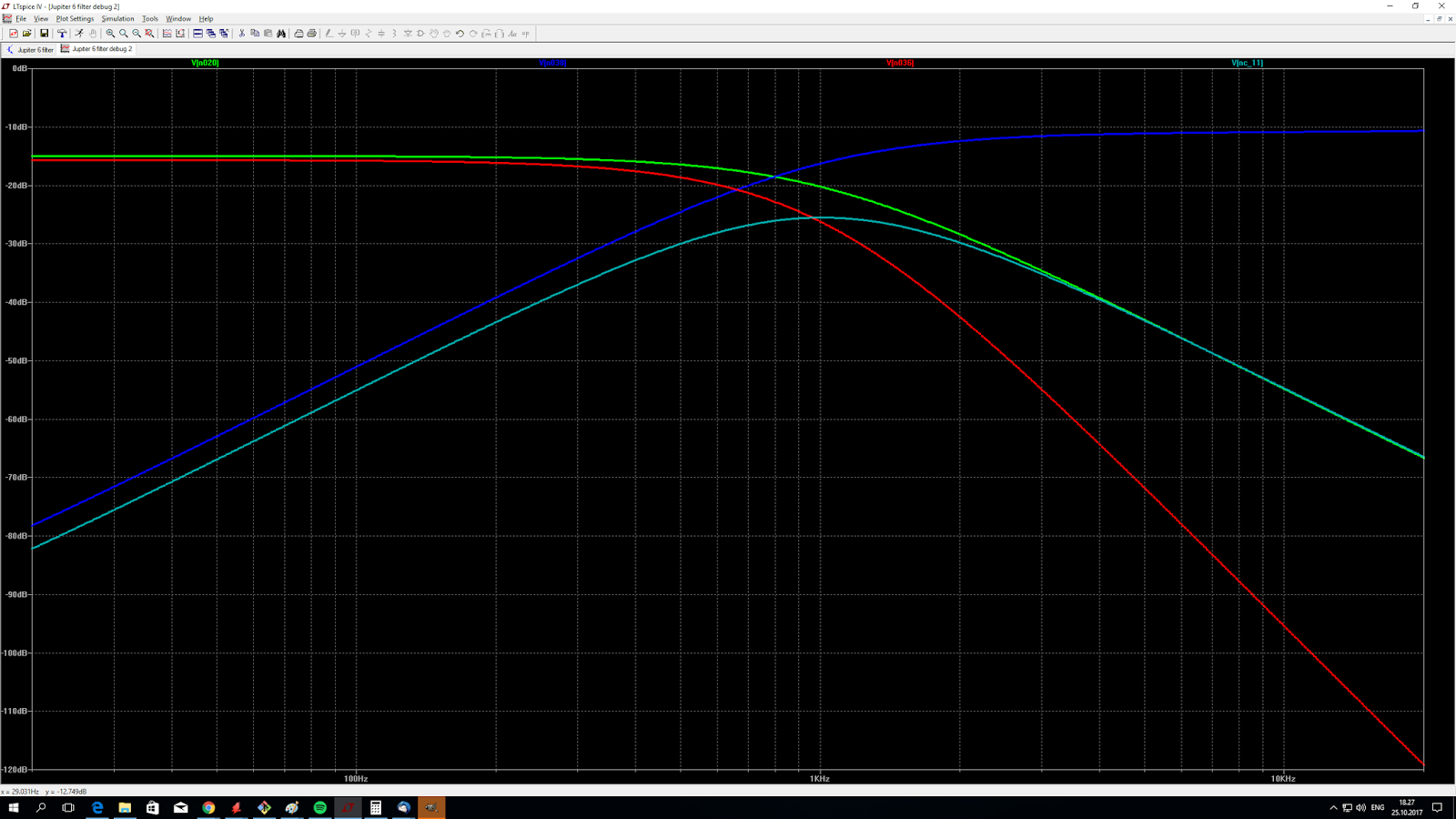
This page shows one method - use multiple filter sections to approximate a 3dB filter with a flat response. The more sections the better, but even four sections is pretty good for a 20-20 000kHz signal.
As a side note - the same page mentions NP capacitors, bipolar electrolytics, and says that film capacitors cannot replace them - this is interesting information as I've stumbled across NP in other circuits.
A similar approach seems to be in use on
this page, which is a modification for the Sequential Circuits Pro One. It uses fewer sections (two?) and has an additional cap (C3).
But how does one calculate the frequency of each section?
In a normal active low pass filter (6dB), the frequency is 1/(2*PI*R2*C) and the gain is -R2/R1 where R2 is the resistor in the feedback loop.
It seems that the same holds true for each section in the multi section filter. For example:
1/6.28*100nF*1MOhm) = 1.59Hz
1/6.28*33nF*330kOhm) = 14.6Hz
...
which matches the frequencies next to the sections.
This would mean that the lower section of the Pro one filter is 338.8Hz, but the rest - the 270k and 3.3n combined gives us a 268.1Hz filter which seems a bit strange - however, I'm not sure this is the way to calculate the combined frequencies.
As for the gain, if the same formula as before is correct, it would be -270k/15k = -18.
The pink noise filter in the pro one matches the inverting shelving low pass filter found on
this page. However, the only formula, found in the
gif, is missing the lone cap in the feedback circuit.
Funny enough, the same filter topology is found in the
BOSS CE-2 pedal's de-emphasis filter :). The de-emphasis filter reduces treble, which of course means it is a low pass filter of sorts. :)
On that page, the circuit is fully explained. When calculating the frequencies, the lone cap is omitted. It says that it is an LP of some sort but it is not essential when calculating the shelving frequencies.
The filter right after the transistor in the pro one circuit is a simple non-inverting HP filter. C2 and U1b forms a shelving HP filter like
this.
The first filter in the Ray Wilson Noise Cornucopia is a simplified non-inverting amplifier filter as shown
here and here. Its gain is 1 + R10/R9 (=48), the frequency is 1/(2*PI*R10*C4), or approx 34kHz.
ERROR: det er et lowpass non inverting shelving filter.

















































{kind=link}